
September 20 - October 6, 2016
Blog posts by Michelle Côté and Scott Dallimore, scientists with NRCan, recount the important scientific research taking place aboard the CCGS Sir Wilfrid Laurier research vessel. NRCan’s Geological Survey of Canada (GSC) is investigating offshore geological hazards and identifying sensitive marine habitat in Canada’s Western Arctic. NRCan is working on ocean and sea ice science in collaboration with the Department of Fisheries and Oceans (DFO) and the Monterey Bay Aquarium Research Institute in California, which has a special interest in marine technology.
Table of Contents
- Onboarding science equipment
- Touring Cambridge Bay and a historic 100-year-old ship
- The Arctic Expedition Route, September 20–October 6, 2016
- Crew Arrival
- Beaufort Sea Mud Volcanoes
- Mooring work, CTD casts, and surface seawater analysis
- First Dives
- Underwater Operations
- Push-core collection and whale feeding marks
- The search for methane
- A final blog from the senior scientists on board!
Onboarding science equipment
While much work has gone into the planning and preparations over the past year for the 2016 Beaufort Sea Geoscience Research Program, leaving the office in Sidney, B.C., always feels like the true start of a field program. Hans Thomas, Monterey Bay Aquarium Research Institute, and I arrived in Cambridge Bay, Nunavut, today after an overnight stopover in Yellowknife, NWT. It was exciting to see the Canadian Coast Guard vessel Sir Wilfrid Laurier anchored in the bay as we were coming in to land.
We were met at the airport by the extremely helpful Dwayne Beattie from the federal agency Polar Knowledge Canada, which is developing the Canadian High Arctic Research Station (CHARS) in Cambridge Bay. He had been busy all morning consolidating the large amount of gear that needs to be loaded onto the Laurier: all the gear we had shipped up from the south, as well as almost 30 boxes of samples from summer research programs to bring back south for analysis. As we approach the Cambridge Bay dock, six neat piles are ready to be netted and slung onboard by the Coast Guard helicopter. At 3 p.m., all the prep work has been completed and everyone is ready to load. The co-ordination and efficiency of the Coast Guard crew getting the six loads onboard was beautiful to watch, and the power of the new Bell 429 helicopter was impressive as it lifted our two heaviest loads at 1,390 lb. each (just 10 lb. shy of the load limit). Special thanks to Angulalik Pedersen, POLAR’s technical science support technician, for his great help today.

Coast Guard crew signals to Bell 429 helicopter

Bell 429 helicopter bringing one of six loads onboard
Touring Cambridge Bay and a historic 100-year-old ship
Dwayne Beattie gave us a tour of Cambridge Bay, and later we headed over to the site of Old Cambridge Bay to get a closer look at the hull of the Maud, built in 1916 for the second Arctic expedition of the polar explorer Roald Amundsen and raised earlier this summer for eventual return to Norway. We also checked out the progress on the construction of the Canadian High Arctic Research Station (CHARS) and got settled into its newly opened accommodations for scientists.
The weather feels chilly and damp to us, and our faces are a bit wind-blown from persistent wind. But everyone is very pleased with the how the day unfolded, and we look forward to the rest of the research team arriving tomorrow!

The Maud belonged to famed Arctic explorer Roald Amundsen that sank off the coast of Nunavut in 1930.

Canadian High Arctic Research Station -- the new research facility in Cambridge Bay, Nunavut.
The Arctic Expedition Route, September 20–October 6, 2016
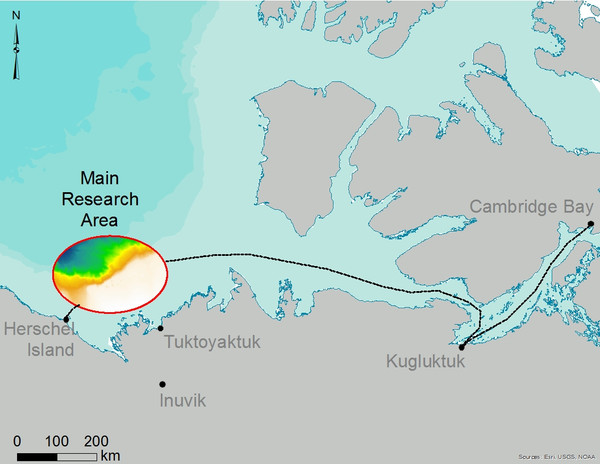
Area of Operation
Beaufort Sea between Cape Bathurst and Herschel Island; Chukchi Plateau.
- September 20: Cambridge Bay, Nunavut, for loading and harbour activities
- September 21–22: travel to Kugluktuk
- September 22–23: fuelling at Kugluktuk and departure for main research area
- September 24–30: research activities offshore of Tuktoyaktuk
- October 1: travel to Herschel Island
- October 2: helicopter from Herschel Island to Inuvik
Inclement weather or ice could cause a delay of one to two days in this schedule
Crew Arrival
After crew change flight delays, the team is finally all together and ready to start an exciting science program. Everything is going very well. We got onshore yesterday (small island in Kugluktuk bay) to calibrate some compasses in sea ice profilers. We were working in t-shirts, which is pretty crazy for the Arctic near the end of September.

Most of the science crew after the safety drill on the deck of Wilfrid Laurier with Cambridge Bay in the background.
Beaufort Sea Mud Volcanoes
As development continues in the Canadian Arctic it becomes crucial for scientists to understand the causes and effects of changes to the seabed and to identify areas of special concern, including ecologically sensitive habitats as well as geohazards. Mud volcanoes in the upper slope area are particularly interesting as they are thought to be very dynamic and have been found to support a unique habitat conditioned by ground water flow from depth and an environment rich in dissolved methane.
Charlie Paull and Dave Caress, MBARI, and Scott Dallimore, NRCan, spent a good deal of time discussing and planning autonomous underwater vehicle (AUV) survey locations. One of the anticipated surveys aims to collect new bathymetric maps of a 1.2 km diameter mud volcano - a circular mound rising 15 meters above the surrounding sea floor. These are dynamic features formed by pressurized fluid and gas flow from depth extruding sediment at the sea floor. Resurveying this location with MBARI’s high-resolution mapping AUV’s will allow us to determine if morphologic changes can be detected on the surface of the mud-volcano since we last surveyed here in 2013. These bathymetric maps, in combination with the other research studies, will give us a better understanding of ongoing processes.
Michelle Côté, NRCan spent the day preparing several MBARI-designed, osmotic-pump samplers which use a saline gradient pump to slowly, but continuously collect water samples - up to three years if necessary - from mud-volcanoes where seafloor fluid flow has been observed.
These osmo-samplers are unique in that the density differential between salty and fresh water drives the pump, thus requiring no power supply for the duration of its deployment. Chemical analyses will be conducted by researchers at the University Maryland of and University of Alaska. We plan to deploy two osmo-samplers and collect them during a future expedition. Combining data from the osmo-samplers with repeat AUV bathymetry surveys will help us better understand how processes occurring below the seafloor, such as melting permafrost and methane hydrate formation and dissolution, may cause visible areas of seafloor instability. We can visually identify these areas within the AUV-derived high-resolution seafloor maps as unusual bathymetric features as well as mounded and slumped topography. We then video ground-truth the bathymetric surveys seafloor using the Mini remote operated vehicle (ROV).
MBARI ROV engineers Dale Graves, Ben Erwin, and Frank Flores readied the Mini ROV for a brief test dive to 50m. All systems functioned properly and many of the Canadian Coast Guard staff filed into the ROV control van for a brief glimpse of the HD images broadcast from under the ocean.
- Lonny Lundsten, MBARI and Michelle Côté on behalf of the science party

Planning autonomous underwater vehicle (AUV) survey locations

Michelle Côté, NRCan spent the day prepares osmotic-pump samplers
Mooring work, CTD casts, and surface seawater analysis
The principal activities conducted during this expedition on Sir Wilfrid Laurier have been led by Chief Scientist Humphrey Melling of DFO Canada. These activities include the servicing of sub-sea oceanographic instruments and moorings for ocean and sea-ice monitoring, CTD & rosette casts at selected locations, and continuous underway measurement of surface seawater accessed via a pumped thermo-salinograph.
Observations by instruments mounted on these oceanographic moorings provide continuous year-round ocean data that complement the detailed but short-lived surveys conducted from ships. The moorings enable affordable long-term, monitoring of the seas surrounding Arctic Canada.
The instruments used on these moorings are acquiring intriguing and ecosystem-relevant views of the polar ocean at times of the year when humans are not there to see them. Upward-looking sonar at the moorings’ top measures ice thickness and topography, revealing the presence of ridges, level ice, and ecologically important leads; the sonar activates an interleaved second mode in summer to measure storm waves and surges (important to ocean mixing and to safety on shore and at sea). Doppler sonar positioned deeper in the water column measures ice drift and ocean current at all depths, revealing opening and closing of the flaw lead in winter and the upwelling of nutrient rich water towards the photic zone. The strength of the echoes received by Doppler sonar reveals the ever changing distribution of zooplankton in the water column. Sediment traps collect falling detritus, delivered by current from river mouths and eroding coastlines or originating from the bodies of living and dead marine organisms. Ambient sound recorders provide continuous recordings of sounds from marine mammals (e.g. bowhead, beluga, bearded seal, walrus), human activity (e.g. aircraft, shipping, distant seismic survey) and natural processes (ice fracture, ridge building, wind waves, blowing snow, seabed gas venting). Conventional sensors for seawater temperature and salinity reveal the seasonal cycles in shelf-water properties driven by heating, cooling, freezing and weather events.

Deploying the mini remote operated vehicle

Glimpse of the high definitions images broadcast from below the Icebreaker Sir Wilfrid Laurier
First Dives
It’s beginning to feel like we’re in the Arctic now. While working on the deck there is a biting wind, which cuts through your clothes and chills your bones. There has been a low-lying fog surrounding the ship at most times and yesterday it felt as if the fog had become frozen, raining down an occasional drizzle of ice. Shackles which attach ship-based cables or ropes to deployed vehicles are starting to freeze upon recovery, complicating deck operations.
At 7:30 AM we deployed the Mini remote operated vehicle (ROV) for a dive to the 420m mud volcano site. This is an area on the seabed which is a circular feature of freshly erupted mud, 15 m in elevation above the seabed and 1.2km in diameter. There are a variety of microhabitats on the mud volcano, which all appear to exist based on the age of the material on the surface in any given location. We believe that the intermediary aged sediment provide habitat for a polychaete worm that uses chemosynthetic bacteria as its food source.
The worm is essentially ‘farming’ and consuming these bacteria in its gut. In return, the bacteria are supplied with a stable living environment - within the body of the worm - and they are provided with a fresh supply of oxygen and chemical rich water. These bacteria use this chemical-rich water to drive the chemosynthetic reaction, thereby creating simple sugars. The process of chemosynthesis is much like photosynthesis except that the chemicals in seawater drive the reaction instead of the sun’s energy.
One important note is that the mud volcano is not a volcano in the sense that there are underlying processes in the earth’s crust that extrude lavas or even hot water from the seafloor. Mud volcanoes are areas where gas or fluid, or a combination of the two, are being extruded through existing seafloor and depositing a fresh layer of liquefied sediment and gases, in this case methane, from deeper layers of the seafloor. The slow and steady extrusion of the liquefied sediment and gas causes circular, blister-like feature, resembling volcanoes, to appear on the seafloor.
We recovered the MiniROV so that it was on deck by 11:30 AM, and steamed to the autonomous underwater vehicle (AUV) recovery location, retrieving the vehicle by 12:30 PM. Unfortunately, the mapping AUV did not perform as expected overnight and we appear to have collected a survey which is marginal in its use. We believe the AUV’s behavior may have been caused by a tail cone which was knocked out of alignment when the AUV was deployed, a reminder of the challenges faced when deploying high-tech remote sensing gear in distant and often harsh environments.

Calibrating compasses. We went ashore on a rocky island in the bay near Kugluktuk on a beautiful afternoon to do the calibration.

Ben Erwin pilots the ROV during recovery.

Patch of chemosynthetic worms found on the mud volcano.

Men and women of the Canadian Coast Guard handle the lines during the MiniROV recovery.
Underwater Operations
Autonomous underwater vehicle (AUV) and remote operated vehicle (ROV) operations are now underway. We’ve developed a team rhythm and the crew is expertly handling AUV and ROV deployments.
There is an ongoing dance between the various scientific elements of this expedition to integrate the mooring work, CTD casts, AUV mapping, and ROV dives. With each new expedition there is a learning curve for ships’ crew, scientists, and ROV/AUV engineers. Once the partners get into the rhythm, the dance becomes increasingly graceful.
Today’s AUV recovery was executed flawlessly by the crew. A small boat was used to grab and tow the AUV from its surface location to ship-based tag lines and the crane master hook. Once hooked, the small boat exits swiftly, leaving the AUV for the ship crew to bring aboard, cradle, and tie down.
After this morning’s AUV recovery, the ROV engineers readied the MiniROV for our second dive to the 420 m mud volcano. Once on the bottom, we deployed our second osmo-sampler, then we took ambient water and sub-seafloor temperature measurements, then collected three push cores. We next ‘flew’ a ~400 m transect across the mud volcano to 1) collect video transects for biological analysis, and 2) to visually identify contacts between different ages of seafloor.
While transecting, we received exciting news from Dave Caress: he had just completed the initial processing of the data collected during the previous night’s AUV mission and brought us the new map. It showed very clear differences in structure from mapping efforts of just a few years prior and our dive was in an area of notable change. This had us changing courses mid-dive to “ground truth” the newly revealed contacts. Even more exciting, the final push core that was collected on this dive contained gas hydrate, an ice-like structure of methane and water, which began disassociating within the core once at the surface creating noticeable expanding pockets of gas and visible bubbling.
We had an excellent day of sampling and the dance continues….we plan on deploying two AUV’s for night ops shortly.

A rigid hull inflatable boat retrieves and tows the AUV back to the SWL.

Once cradled, the AUV is quickly secured on deck.

The final push-core sample of the day contained methane hydrate.
Push-core collection and whale feeding marks
The mission today was to video ground truth a slump scar. A slump scar is essentially an underwater landslide, with exposed bedded layers similar to the way a road cut will expose layers of sediment.
We traveled over flat, sedimented seafloor on our approach to the slump scar.
The slump scar, we collected two push-cores and a cobble. The documentation of cobbles is significant because they are not specifically part of the background geology in this area. The varying pebble types and their abundance suggest that they have been deposited by glacier ice. The specific characteristics of these cobbles can help us determine their source of origin and help reconstruct the glacial history of the Beaufort Sea area.
We also passed over several unusual marks in the seafloor that resemble elongated scoops removed from the seafloor – think of the mark you leave when you take a spoonful of ice cream off the top of the pint! We think the marks, which are 15 – 30 cm wide and several meter long, are related to marine mammal (possibly whale or seal) feeding. In other parts of the world, grey whales and several other whale species feed on organisms living in and on the muddy seafloor by essentially diving down to the seabed and taking a big scoop of sediment away with their mouths. With the baleen whales, they will then push the water and mud out through the baleen leaving them with a tasty mouthful of crustaceans, fish, and worms.
Another theory suggests that the depressions are created by whales during bottom feeding as they attack prey. The whale locates prey and dives after it and the depressions are created by the jaw of the whale hitting the seafloor during the pursuit. The sediment is lifted up from the seafloor and is then deposited around the mark during departure, resulting in the gauge mark (Hein et al. 1995). In an effort to investigate this further, the remove operated vehicle (ROV) pilots recorded a video mosaic of a mark which we then processed with a 3D modeling program. This will allow us to accurately calculate the dimensions and volume of sediment that was removed from the ‘scoop’.
During transit to the slump scar Lonny Lundsten, normally the scientist in charge of documenting the dives, had the opportunity to pilot the ROV for a few minutes. He did a great job!
As the ROV climbed the slump, we sampled and surveyed the exposed bedding layers. On the top of the slump we began to see more rocks, and marine organisms that typically attach to hard surfaces, including a few crinoids and corals. This is indicative of the presence of buried cobbles. We collected one more cobble and one more push-core and recovered the ROV.
Upon surfacing, we retrieved and processed the cobble and core samples. For push-cores, we measure, photograph, and describe the sedimentary layers. We then take 1 cm slices of the cylindrical sediment core, bagging and labeling them for future analysis.
Lonny Lundsten and Michelle Côté on behalf of the scientists on board

Whale-mark-3D: Image of a 3D model of the whale feeding mark that was observed during today’s dive. We can use this model to estimate the dimensions and the volume of sediment that was removed. Width of feeding mark is ~14 cm.

Charlie core processing: MBARI lead scientist Charlie Paull begins processing one of the sediment push-cores collected by the ROV.

Core_sliced_bagged: Once described and photographed, 1 cm slices of the push-core are bagged and labeled for future analysis.
The search for methane
While the ROV and AUV surveys are the priorities for this research expedition, we are always designing other science tasks which are undertaken as time allows. Investigating the release of the methane into the water column from seafloor features is an additional area of interest for the scientists onboard. The main questions are:
1) are the features where we have observed gas discharge in the past, still discharging gas?
2) how far up the water column does the methane travel and does any of the methane reach the atmosphere?
3) what is the concentration of methane in the water column from these features?
In an attempt to answer these questions, we image the water column for indicators of bubbles using a sounder mounted on the hull of the ship. We also use the Department of Fisheries and Oceans (DFO) CTD rosette which has 24 sampling bottles. The CTD instrument measures the conductivity and temperature of the water column and as it is dropped we trigger the bottles at various depths.
Samples of the water are placed in small glass bottles that will preserve any methane dissolved in the water. The samples will then be analysed for methane concentration by Dr Laura Lapham at the University of Maryland. But first we have to survey the features to see if there is anything to sample!
After the AUVs were deployed, there was finally a window to do a CTD rosette cast. We transited to a feature we call “Coke Cap”, named because it has the shape of a bottle cap. Humfrey Melling (DFO) deployed a mooring at this site in 2012 that had a sonar system that imaged the seafloor. He found that this feature periodically emitted gas, much like a “burp”. Our first step was to conduct a short
survey of the feature with the 12 kHz sounder so we could image the water and look for gas emission from the sea floor. We were a bit disappointed that is appears to be a “quiet time” for the feature with
no dramatic plume of bubbles visible in the sounder data. But there was evidence for small bubble plumes, so we chose our location and the vessel was positioned for our CTD/rosette cast.
We triggered 18 bottles in the depth range of 5-280 m – that was the fun part! Once the rosette was back on deck, the more labour task of sampling the water took place. No results to report though as we have to wait for the samples to be analyzed in the lab.
We hope to have time to survey and sample more features, but with the autonomous underwater vehicle (AUV) and ROV missions producing such high quality, interesting data… we may have to complete this task on a future cruise.
Lonny Lundsten and Michelle Côté on behalf of the scientists on board
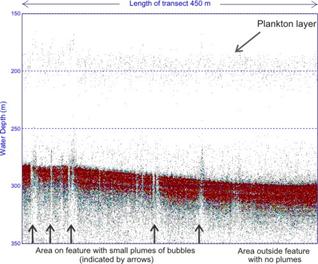
12 kHz sounder data collected over the “Coke Cap” feature.

Michelle Côté sampling the water from the rosette.
A final blog from the senior scientists on board!
We have enjoyed the experience of blogging from the CCGS Sir Wilfrid Laurier. We certainly hope that avid blog readers have gained an appreciation for the challenges and the unique experiences scientists have when undertaking a multitasked research expedition in the Arctic. As we are finishing up the expedition, we offer a few reflections as the most experienced science ‘deck hands’ on the ship. Together Humfrey, Charlie and Scott have a rather sobering 120 years of field experience.
The 2016 research program on the Laurier has been a pleasure to lead. The participating scientists and engineers have of course been the work-horses in achieving our objectives. The skill and enthusiasm they have shown has been outstanding. Similarly, the crew of the Laurier has been terrific. They have dealt with cold weather launching of small boats, handled our marine science gear with care and provided hospitality beyond our expectations (the only down side being that our clothes are certainly a bit tighter after so much good food!). Everyone has worked together with a common purpose and camaraderie.
As this is this is the fifth cruise we have undertaken together on the Laurier, we have the pleasure to reflect on the accomplishments we have enabled through our collaboration. We have strived to advance two research streams - monitoring and discovery science. The monitoring component, a fundamental responsibility of Fisheries and Oceans Canada, focuses on observations of sea ice properties, ocean physics and chemistry. This 2016 expedition is the 26th year that Humfrey Melling has undertaken his sea ice monitoring program providing one of the longest time series in the Arctic Ocean quantifying sea ice processes. This valuable data provides a basis to evaluate hazards to seabed structures caused by sea ice and expands our knowledge of ocean and ice processes and how they might change in the future.
The Geological Survey of Canada has a long history of exploration in the western Arctic which dates back to the 1913-16 Canadian Arctic expedition. Much of our discovery science seeks to assess the response of permafrost and gas hydrates to marine transgression. Monterey Bay Aquarium Research Institute (MBARI) has contributed their of state-of-the-art capabilities in ROV and AUV surveying and their substantial knowledge and experience in analyzing and interpreting seabed processes. Together we have sampled offshore permafrost and gas hydrates, documented ground water flow and unique sea bed habitat.
We have also learned a great deal about active sedimentary processes, and extended our knowledge about the glacial history of the Beaufort Sea. A substantial accomplishment on this cruise was re-surveying mud volcano features and documenting change that has occurred since 2013. We also observed active mud flows discharging from vent features.
Looking to the future, we feel strongly that the Arctic ‘matters’. It is a unique and dynamic environment that is arguably undergoing some of the greatest change on the planet. It is important to continue and enhance scientific research in this setting and given the logistics challenges our view is that collaborations like ours are hugely beneficial.
Scott Dallimore, with Humfrey Melling and Charlie Paull, senior scientists on board

Science team and crew of the Laurier

Senior scientists on board, Dallimore, Melling and Paull

Canadian Coast Guard Ship Sir Wilfrid Laurier